- 近期网站停站换新具体说明
- 按以上说明时间,延期一周至网站时间26-27左右。具体实施前两天会在此提前通知具体实施时间
主题:【原创】茗谈199:羽人-280B -- 本嘉明
(七)


280B乘员舱的侧面窗,玻璃是可以摇下来的(普通小飞机都不行),这是为了增加长时间在路面驾驶时的舒适度。这里我们不采用电动车窗,因为电动车窗虽然不常出故障,但由于这个小小的部件里,包括有夹持器、升降机架和电缆驱动器等,这些不但增加车门的重量,而且因为是高电流设备,对应的保险丝确实有一定的概率会烧断。一旦保险丝烧断,往往要飞行员花个几分钟来换上备用保险丝;而万一是更大的故障,那就需要地勤兵拆开车门。假如车窗出故障关不上,会影响飞行,因此我们不想在前线冒这个险。座舱内宽度为85厘米,即便路面驾驶状态下,司机坐在左侧,一个身高1.7米以上的司机,伸展右臂,仍然够得着右边的车窗摇把。另说一句,假如总宽85厘米的正面仪表台依然没有空间同时容纳汽车方向盘和飞行仪表的话,我们会把方向盘设计成可拆卸的,飞行前把方向盘卸下放在前座坐垫下的储物格里,这样就不会遮挡仪表盘。

上图是在SR-22座舱基础上模拟的羽人-280B座舱。SR-22 是SR-20的改进型,明星Angelina Jolie自己就开一架SR-22。SR-22的座舱是一排双座,内宽度大约120CM,我们改到内宽85CM,大致就是这么一个效果。由于左侧“路面驾驶舱”部分比较窄,长途驾驶会不太舒服。这里的问题是中控台,280B是类似于SR-22的正规小飞机,不能按“飞行汽车”马马虎虎的标准来,况且军用型还需要更多的“载具控制旋钮”,所以这个体积的中控台不可或缺。我的建议是在中控台下的地板上设两条横向的滑轨,整个中控台可以顺着滑轨左右滑动,要进入“路面驾驶模式”前,按一个钮,中控台向右滑到尽头,呆在“飞行驾驶舱”部分的腿部空间里,这样“路面驾驶舱”的腿部空间就足够大了。
玻璃摇下的功能,只在“路面行驶模式”可用,切换到飞行模式时,车窗必须关闭,并且直到落地前,车窗会被锁住无法摇下。
280B与在路上行驶的普通SUV相比,有个明显的优势,就是驾驶员的下视角更大。第一,280B在行驶状态时,车身净高(指车顶到地面的高度,不考虑折叠起来的机翼)比普通民用车更高,视野更开阔(当然重心也就更高,这是缺点)。

第二,280B作为飞机,强调要有一定的下视角,以便在飞行中观察地貌,与飞行地图比对,所以正面仪表台比普通汽车的要低15CM左右,机鼻线条(相比普通车辆的前盖)也有一定的下滑角度,这样不遮挡视野。第三,我们前面说过,路面行驶时,如果速度超过280B作为飞机时的失速速度(110公里/小时),那么残留机翼会产生比较明显的升力,解决的办法之一,就是开车前,通过悬挂系统把机头摁低一点,整个车身前低后高。这样一来,驾驶员更便于观察路面了。

飞行时,飞行员前视的仰视角一般不需要大于80°,更重要的是能扭头向后上方观察,因为低空飞行的小飞机在作战中很担心来自后上方的敌机和火力打击。这里我们用两个方法解决,第一,天窗。第二,后视摄像头,在LCD屏幕上留一个角,显示后视的图像(主电脑先预读),一旦主电脑AI发现图像异常,用某种警告笛声告知飞行员。由于各种不同的笛声代表不同意思,飞行员立刻知道要检查哪个指标。
理论上,飞行中平视的左右环视视角应该有240°,这里影响视野最大的因素,就是两根A柱。因为A柱是机身框架结构中重要一环;而且作为路面汽车,你得考虑到撞车或翻车时对驾驶员的保护,所以A柱的位置和粗细,不是随便拍脑袋的事。SKYMASTER原本是前排双座设计,而我们改为单座了,因此无法照抄。
另一件大事就是噪音。噪音主要来自两台活塞发动机和螺旋桨(搅动空气)。在螺旋桨上可以加装降噪装置,但这样就增加了成本,也略微损失效率。能做的降噪措施有:
一,带耳机。耳机既便于飞行员接受通讯,也能降噪。这是最有效的降噪措施,但在路面行驶时不适用,因为驾驶员必须听各种车外的声音以防突发情况和路人示警。好在路面行驶时,前发动机停用,后发动机往往只需要输出不到1/3的功率来发电,此时引擎噪音比较小,也不再有螺旋桨噪音。
二,给发动机安装 “减音器(muffler)”。Muffler是所有小汽车都有的减音装置,至少尾部这台发动机有条件安装(如前所说,头部发动机在路面行驶时不会开动。而降噪主要是为了路面行驶,在飞行中不需要降噪)。这样会增加一些死重,但考虑到路面行驶会穿过一些城镇,按国家标准降低噪音分贝是必须的。
三,其他措施。比如机舱内用吸音/隔音材料;动态降噪降震(用反周期震动抵消);后发动机装在浮筏底座上。
(八)
汽车和飞机,有些子系统是类似的,理论上可以归纳合并,它们是:
1)控制(包括自动驾驶)
2)导航
3)人机交互(仪表显示)
4)通信
5)安全
6)灯信号和照明
一,控制。
飞机的控制,就是控制俯仰、横滚以及动力输出。飞行员直接使用的是操纵杆、脚踏板以及很多钮。
自动档汽车的控制,就是控制方向(前行,倒车)和速度(加油门、刹车)。司机直接使用的是方向盘、脚踏板以及少量钮。
这一科目里,也包括悬挂系统。
如前所述,我们在驾驶台设计中,比较注意把“飞行”和“路驶”两套控制系统分割开,而目前多数“飞行汽车”的设计是尽量合并。
我们分割开的好处有两个:
A,安全,避免驾驶者在紧张关头,头脑中时空错乱而误操作。
B,能完全迎合驾驶者原本的驾驶习惯。原来怎么开小飞机的,还是差不多的环境;原来怎么开车的,还是差不多的盘儿。这样一来,在遇到险情时,允许驾驶者情不自禁按往常的肌肉记忆下意识地操作。
分割开最主要的坏处,是“多耗用”了前座驾驶者的正面仪表台。正常情况下,假如你真要设计一架纤细机身的轻型螺旋桨飞机,凭145匹马力这个发动机的个头,驾驶舱净宽0.75米(甚至更窄)是完全做得到的。但由于280B前后两套起落架结构庞大,有远大于普通小飞机的液压机件,从而迫使机身放宽。所以驾驶舱净宽为0.85米,多出来的空间,就容纳了“相对独立”的“路驶套装”。
通常,小飞机都有两套驾驶设备,万一主驾驶那套失灵,副驾驶立刻顶上。在280B上,就是后座也有一套飞行控制设备。虽然后座飞行员的视线被前座遮挡了一部分,但对于多数小型慢速飞机来说,靠后座飞行员来降落,并不困难。
二,导航。
小飞机的导航,最原始是三小件:地图、指南针、码表(stopwatch)。今天是几大件:
A,GPS接收机
B,与地面塔台的应答装置(transponder,就是transmitter-responder的简称),又叫 “beige box”,通常就装在一台VHF收音机旁边。
C,traffic collision avoidance system(TCAS)。Transponder是不间断向最邻近的地面指挥系统(air traffic control,就是某一个管这片空域的塔台)发射无线电信号,表明自己的身份编号,并接受塔台指挥。而TCAS这部小机器独立操作,不需要塔台帮忙,它以本飞机为圆心,能探测/“信号握手”周围的其他小飞机,避免空中碰撞。
D,VOR接收天线。Very high frequency omni-directional range (VOR)是一个蜂窝式无线电导航系统,在地面上有序建造一批“导航灯塔”,小飞机接受各个灯塔发出的无线电信号,修正自己的坐标和航线,从一个灯塔辖区,接力飞到下一个灯塔辖区。美国这个系统使用的VHF频率在108到118MHz之间。
E,DME(distance measuring equipment)测距接收天线。从地面站里的设备发射无线电信号,飞机上的天线接受到信号并分析后,得知一些物理距离数据。VOR与DME通常组合在一个地面基站里。
F,ILS接收天线。instrument landing system localizer(简称 localizer 或LOC),是一个地面上的系统,装在机场跑道边,通过无线电信号,告知想降落的小飞机,(尤其在能见度不良的时候)是否对准了跑道。
这些地面上的基建,都是通航产业的“七通一平”。飞机是1905年前后发明的,美国在1930年代下半期就开始营建,二战中基本全国铺完。中国其实没落后,1950年代就有了自己的军用地面导引网络。
汽车的导航,本来比较质朴,毕竟5G还有点远。但自从出了个叫“一休”,不是,叫“一龙”的花和尚,汽车自动驾驶(就是车载导航)一下就火了,连带到车内车外的装备,同样也小步快跑起来。
三,人机交互
人机交互的关键功能,就是监督各个子系统正常运作,一旦有问题立刻报告给驾驶者。这里,对一个飞行员的要求,比对一个路面司机的要求,要高得多。第一,飞机的设备更复杂更脆弱,这些设备/构件必须轻巧,又能忍耐忽高忽低的温度、压力、震动、巨大牵引力下的伸展变形等等,所以更容易遇到意外情况,更容易出状况。第二,飞机不像汽车,哪里不对了可以在路肩停下来检查/重启。第三,飞行员主要精力用于操纵飞行(尤其作战中),对各种警报只能用剩余的精力(注意力)去对付。第四,涉及领域广,包括发动机(温度、压力)、电力系统、电子/通信系统等等,都是完全不同属性的设备。第五,汽车黑屏(航电崩溃)也很危险但相对容易处理;而飞机一旦黑屏,飞行员要依靠最原始的目视操作+无动力滑翔,平安落地,那真是搏命。
所以飞行员必须极端冷静,面对特情,反应要快要正确(错一次就无法补救)。要把飞行员训练到这个地步,第一在机内人机工程设计上,人机交互系统,能监管得全面、报告得及时且醒目,就很重要了;第二飞行学员必须有大量模拟器训练,最后达到“肌肉记忆”级别的本能,人机合一;第三,有大量“低成本飞行训练”,飞到空中练胆量,见识不同空情/天候。280B,就是针对第一条和第三条的抓手。
对于汽车来说,如果我们暂不考虑特斯拉的话,比较传统的燃油汽车,“人机交互”这个领域已经比较成熟,可靠性高。比如大量的传感器监管着发动机的温度、压力、耗油状况、功率输出稳定性、冷却水温度等等。这些功能如果全部移植到“飞行汽车”里,技术上没难度,只是无此必要。
四,与外界通信
对小飞机来说,最基本的,必须有VHF无线通信,与地面塔台保持不间断的联系,把自己飞机上的特情报告给塔台,接受塔台指挥临时掉头飞往哪里,降落在哪里,在什么高度/速度飞,等等。如果飞机一切正常呢,塔台就像交警,会安排同一空域的各架飞机错开,你还是得听组织安排。
汽车本身就没有这个需求,虽然现在蓝牙技术允许司机的手机临时接入汽车。但到了5G(全自动驾驶)时代,就不同了。可以说,280B上现在用于飞行的大量设备,到将来就是地面无人驾驶汽车的标配。
五,安全
所谓“安全子系统”,其实就是消防系统,出现特情时先在飞机内自救,从而为平安落地,飞行员哆哆嗦嗦爬出机舱赢得中奖机会。这包括四个部分:
A,更明显的警告。人机交互系统提出的警告没有引起足够的反应的话,再加大警告力度。
B,自救,比如发动机上附带的灭火系统。
C,电路系统的冗余设计,第二套备份顶上来继续工作。
D,每个机上人员的三点式保险带(万一迫降)。基本上民用小飞机是没有弹射座椅的。
汽车的安全设计覆盖全车,着重于对应撞击、翻转、起火。主要的设备有气囊、大量感知设备如避碰雷达、紧急(超越驾驶者权限的)刹车功能,ABS刹车防滑,等等。
六,灯信号
灯信号系统对于小飞机和汽车来说,都是一个大的基本系统,往往也是人们最忽视的系统。它用于内部、外部,也用于白天、夜间。
小飞机在翼尖有导航灯navigation lights,通过左右两翼不同的颜色,告知夜间相遇的其他飞机,自己的航向。此外还有若干taxi lights 和一盏 landing light。
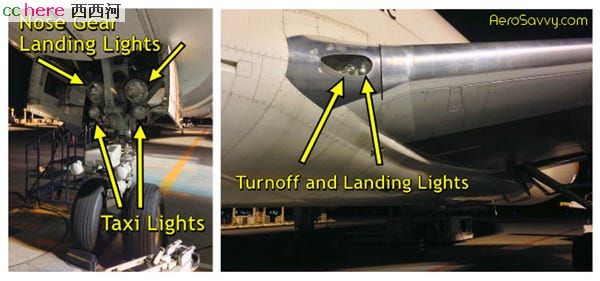
280B作为战斗用军机,还有探照灯。航空用灯,亮度和可靠性必须远高于汽车用灯。
汽车有:头尾的大灯(包括雾灯功能);转向信号灯;刹车/倒车警告灯。
(九)
机内发电系统(Utility Systems),有四个作用:
1)机内电力的生成和分配。
2)以电力推动液压设备的开/关,产生更大的液压力,操纵飞机。
3)机内环境控制
4)满足临时载荷(各种外挂)的用电需求
对于一款飞行汽车,虽然它装备的飞行/路驶两大类设备,使用状况/要求有很大差异,但用一个供电系统支持所有用电设备,显然是可行的。但对于这些五花八门的,耗电后才能获得的功能,要有取舍。
更重要的是,如果把280B看作民用飞行汽车,作为一款小飞机,它的定位是休闲/运动飞机,往往会飞往冷僻的小机场探险/度假。至于军用属性,就更加可能在艰苦的前线/边陲使用。所以发电系统必须做到:
A,在后勤能力不足的边远小机场,能满足于简单补给,就再次使用。
B,不依赖外部动力。发电机不需要外部动力来帮助冷启动或者再次启动(Jump Up)
C,易维护。
D,高可靠性,耐用。
由于绿色环保,小飞机的设计,主流趋势是从More Electric Aircraft (MEA – 从当初的全部液压机械飞控,逐渐增加电传飞控的比重),进化到 All Electric Aircraft (AEA – 彻底电传飞控,也可指纯电动推进)。因为地面小汽车出现了纯电能汽车,全电驱动的载人小飞机也已经出现了。具体操作上,是渐进式,在设计新的燃油发动机小飞机时,试图用一个单一动力包,驱动全部机载设备,这有点像中国海军全电推进的“新概念舰(全能舰)”思路,其优点是:
A,增加可靠性。一台比较昂贵但高可靠性的发动机,要好过两台廉价/不稳定的发动机。
B,减少地勤作业,从而节省飞机的全寿命费用。
C,减少后方的技术支持(来自飞机制造厂或者发动机厂)
D,将来容易升级为纯环保飞机(就是把燃油发动机换成电池组+电动机)
在这个过程中,肯定会升级到电传飞控。按实测,在小飞机上用一套电传飞控,替换掉一套老式的液压机械飞控,在不增加费用的前提下,可以减重100公斤。而小飞机有两套飞控。
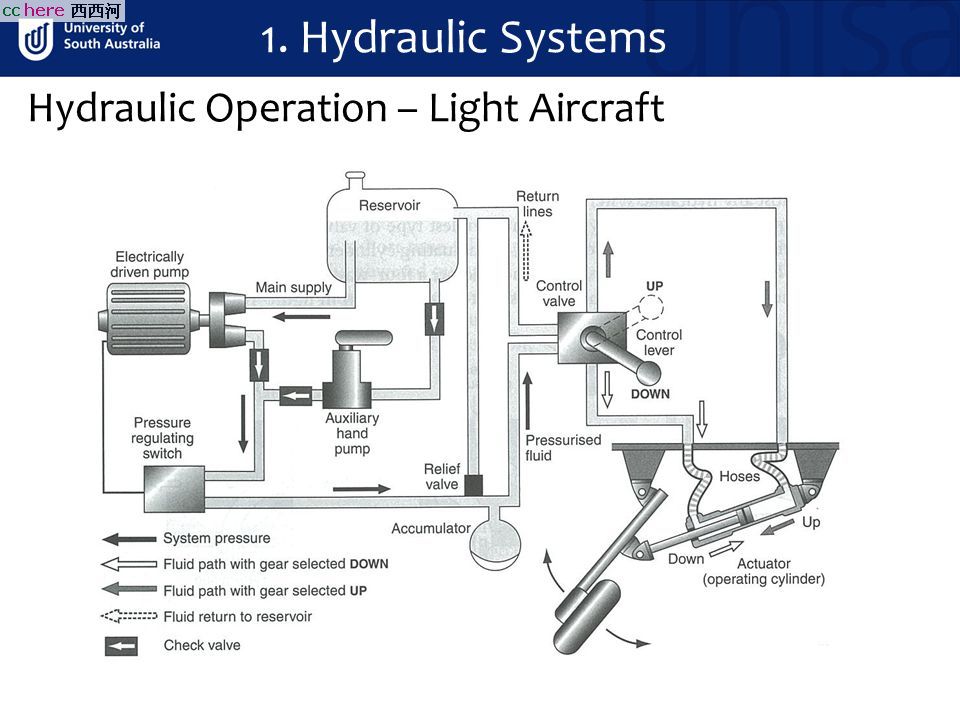
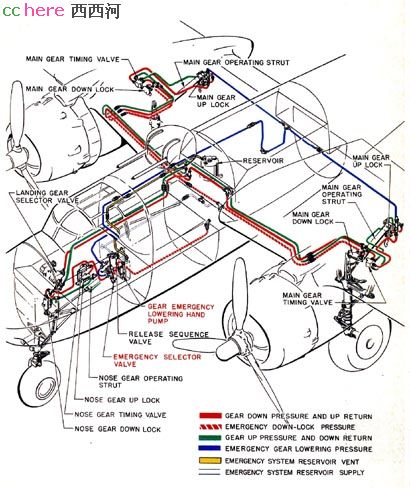
上2图:全液压机械飞控中的收放起落架。全部通过液压油的输送来完成。
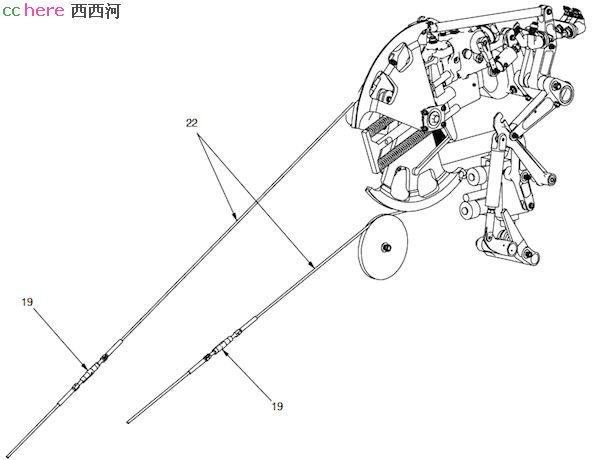
上图:更老式的钢索飞控。其实钢索飞控对于要参加空战的280B,可能是可靠性最高的飞控方式(正常时用液压系统牵引钢索。万一液压系统被打坏,只要钢索没断,纯靠人力也足以扳动)
当然,也有不利因素,我们前面提到过,电传飞控(某种意义上)可靠性不如机械飞控。所以这是一个严肃的课题,因为一旦决策上马“电传飞控”,相应的,顶层设计时要留出更大的发电能力,将来用电的设备只会越来越多。
说了发电,接下来就是用电(Electrical Systems)。
对于民用小飞机而言,用电大头是:航电设备、照明、燃油发动机的冷启动。以塞斯纳小飞机家族的Cessna 182 Skylane为例(在前文我们用它与280B比较了起降滑跑距离),它有一个28伏特的直流电机系统,其电能来自于(燃油引擎驱动的)交流发电机。此外,机上还有一个充电宝------24 伏特12.5A/小时的可充电电池组,当飞机发动机故障无法发电时,电池组替补供电给飞机各系统,维持对飞机的操控;另一方面,飞机在地面上移动/检修时,可以用此电池组启动各子系统,而不必启动发动机。
机上凡是耗电量比较大的设备(电动机、大型伺服机构、电取暖器),最好用交流电,因为能量利用率高。所以,现代的小飞机,同时有交流电和直流电。
低压(28伏)直流电,用于航电彩显设备。这些电能来自一个115伏 400Hz的三相交流电系统。之所以“一机两制”(28伏直流电+115伏交流电),是因为电压高的交流电往飞机各个角落输送时,电力损失小(类似的,中国开发了特高压远距输电技术),而且高压电需要的电缆比较轻,这对于降低死重很重要。
对于燃油汽车,所用电力是12伏直流电,全部来自一台灰头土脑的乡巴佬铅酸电池,汽车行驶时,发动机上附带的交流发电机给电池充电。其实汽车上各个用电子系统条块分割很严重,各有各的封闭回路、保险丝等等,可是啊可是,东西南北中,电池是管着一切的。
目前多数小飞机还是用液压机械飞控,这一块技术已经很成熟,尤其是起落架收放等等力气活儿,液压伺服比较靠谱。但这套系统死重大,也是事实。所以将来怎么转型,是个大事。但大家要记住,所谓电传飞控,不是不要液压伺服机构了,恰恰相反,很可能需要更多,但每个机构都更小更独立,液压伺服机构之间用光缆或电力缆联接。
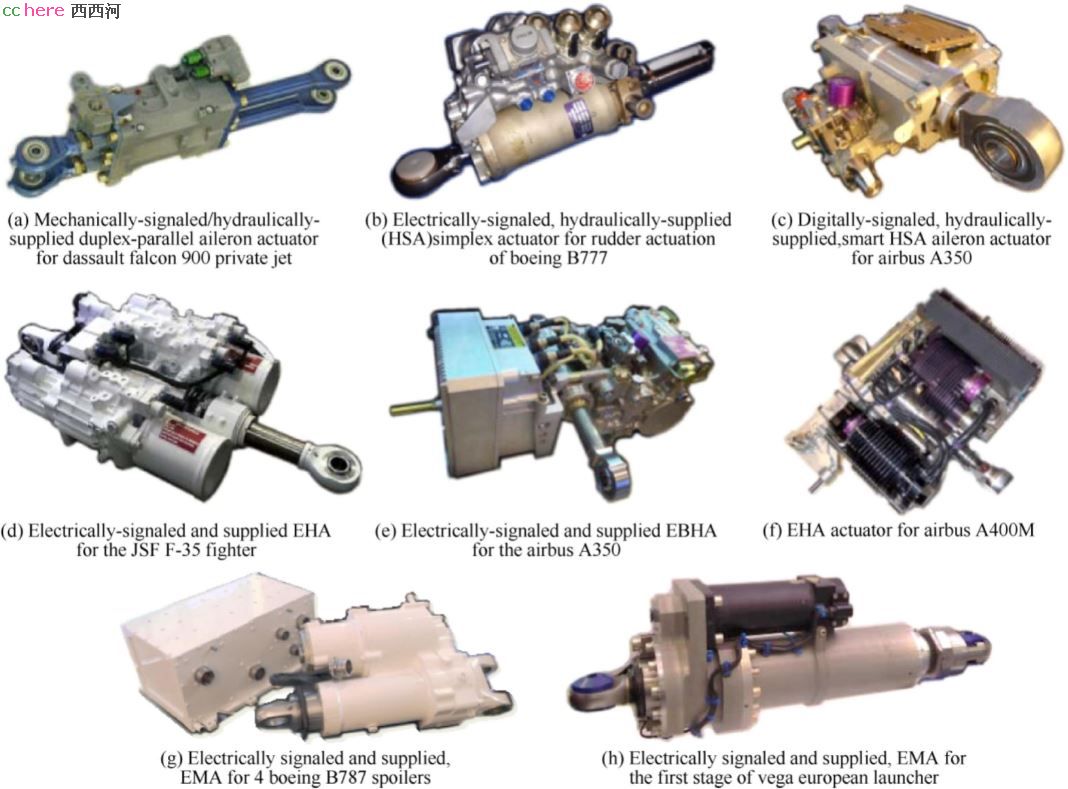
上图:不同技术世代的伺服机构
总的说,任何一款飞行汽车上,发电-用电系统的品质标准,按航空器标准走,是确定的了。
- 相关回复 上下关系8
🙂【讨论】再补几张照片 4 本嘉明 字365 2024-02-01 12:40:34
🙂茗谈199-2 25 本嘉明 字25104 2021-06-08 16:48:56
🙂茗谈199-3 9 本嘉明 字11299 2021-06-10 00:18:20
🙂茗谈199-4

🙂巴西湾流公司技术比庞巴迪达索他们如何? 1 真历啊 字66 2021-06-08 20:55:39
🙂湾流是美国公务机公司,巴西那个是安博威 12 北纬42度 字732 2021-06-08 21:36:00
🙂好的,多谢指教!! 真历啊 字55 2021-06-08 21:47:33
🙂虽然大多是小型机场,但是也很棒,不知道美国大中有多少? 1 真历啊 字150 2021-06-08 17:55:03