主题:【原创】汽车安全技术杂谈-主动安全技术(序) -- 波波粥
家园 【原创】主动安全技术-自适应巡航控制系统(中) 前文说ACC系统有向汽车自动驾驶仪方向发展的趋势,对于汽车行驶来讲,除了周围的交通环境,汽车“脚”下的道路状况也很重要,不然哪天马路上挖一大坑,我的雷达还没告警呢,车子就一头栽了进去,岂不是。。。。。。

所以道路感知能力对行驶安全也极其重要,为此,工程师们开发了道路保持系统(LKS,Lane Keeping System)和路面扫描系统(PSS, Pre-Scan System)。其中道路保持系统可以单独使用,也可以和路面扫描系统结合起来使用。
道路保持系统最基本的构想就是让汽车沿着规划好的道路来行驶,特别是在高速公路上的长距离行驶,可以极大的减轻驾驶员的负担。汽车车道保持功能包括汽车偏离车道警示功能和自动保持汽车在当前车道行驶功能两个方面。汽车车道保持系统主要是利用车载CCD摄像机或车载传感器等获得前方车道路况,并以此控制汽车的行驶方向,使汽车自动地行驶在当前车道上。
一种方法是不依赖于道路上的附加设备,只使用汽车自带的摄像系统(如CMOS摄像头)通过图像处理算法,可以求出车道和车辆的相对运动关系。系统就好像可以“看见”车道的走向和车辆的行驶方向。如果报警算法检测到车辆即将驶离现在的车道,系统会自动切换到转向系统,刹车系统等,来实现对汽车行驶的控制,还可以通过触觉、动作或声音反馈警告驾驶员,切换到人工模式。
另一种更加直接的方式是使用某种探测设备,结合道路上使用的辅助系统,让汽车直接感知到和与预设道路的偏差。最初工程人员的构想很简单,在高速公路普遍使用有反光材料,以利于夜间驾驶

工程师们希望使用某种设备,来利用这些现有的或者“升级换代”之后的反光材料,使得汽车可以感知道路状况和路面状况。
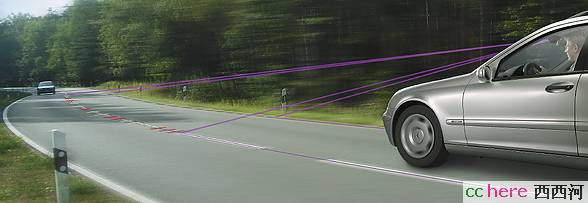
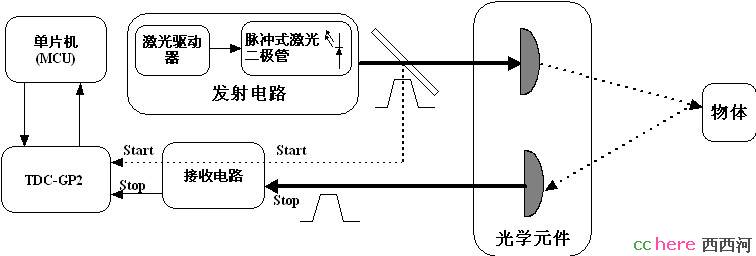
为此开发了一些红外线材料,用车上的红外大灯来发出红外线,通过接受反射的红外线来计算道路状况。不过通过费用,效果的比较,最终还是直接使用激光传感器的更加直接有效。激光传感器的原理和激光测距仪一样,通过在道路两旁设置激光反射装置,汽车携带的激光发生器不断的发出激光束,再接受反射光束,通过计算可以知道与预设道路的偏差。
激光测距的原理图:
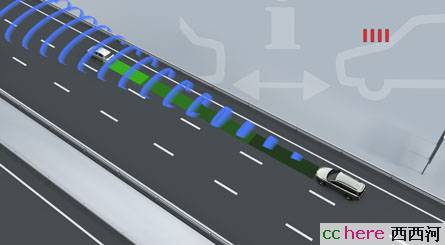
有了激光传感器这个强大的工具之后,工程师们为它找到了一个新用途,那就是路面扫描系统(PSS, Pre-Scan System)。奔驰的F700首次使用了这一系统。
Mercedes-Benz F700

呵呵,大家是不是想到激光三维扫描系统了啊?
这个三维扫描很好很强大,不过呢,银子也是要大大的哦。现在在汽车上使用的激光传感器还没有这么复杂。汽车在车头位置安装两个激光传感器,激光束依照扫描角度差值(如0.5度),依次扫向路面,由于这些激光束和路面的交汇角(有没有更贴切的名字啊?
 )不同,每一束激光经过路面反射后都回产生自己的特征分布。激光传感器赋予每束激光一个特征值,由于道路状况的不同(如起伏程度),造成每束激光与路面的交汇角一直处于变化中,这个特征值也处于变化中,通过计算后可以知道前方道路状况,比如前面有上坡路段,那么油门,自动变速箱会自动调整;如果前方道路上有障碍,会启动转向/刹车系统,来避开障碍物。呵呵,在这个时候,就要和道路保持系统打个招呼了,“兄弟,前面有大坑,您就别保持既定路线了,现在轮到俺来接管控制系统了”,如果LKS牛鼻子朝天,呵呵,那就好玩了。
)不同,每一束激光经过路面反射后都回产生自己的特征分布。激光传感器赋予每束激光一个特征值,由于道路状况的不同(如起伏程度),造成每束激光与路面的交汇角一直处于变化中,这个特征值也处于变化中,通过计算后可以知道前方道路状况,比如前面有上坡路段,那么油门,自动变速箱会自动调整;如果前方道路上有障碍,会启动转向/刹车系统,来避开障碍物。呵呵,在这个时候,就要和道路保持系统打个招呼了,“兄弟,前面有大坑,您就别保持既定路线了,现在轮到俺来接管控制系统了”,如果LKS牛鼻子朝天,呵呵,那就好玩了。汽车上越来越多的驾驶辅助系统,对整车的控制系统要求越来越高了,由此提出了车辆神经网络控制的概念。
 下回再说关键词(Tags): #汽车安全技术, 元宝推荐:爱莲,
下回再说关键词(Tags): #汽车安全技术, 元宝推荐:爱莲,家园 好文送花~ 那个Lexus的LS600貌似开出线了能自动打方向调整回来,还有自动平行泊车,很好玩阿
家园 汽车的主动还是相对主动,系统要TAKE OVER 驾驶员控制汽车 比如前面有大坑,汽车自动避让或转弯这目前的未来不太现实。
家园 目前应用中的主动安全技术 主要还是帮助驾驶员能够更早的认识到危险,以及做些准备工作,比如可以在2m/s的速度范围内调节行驶状态,同时提醒乘员介入操纵。
之所以称为“主动安全技术”,是因为这些技术的目的是为了避免事故的发生,这里的“主动”更多的还是着眼于事故。
家园 向全自动方向发展是“终极目标”么 就像研究机器人的工程师们希望造出和人一样的机器人来。
这样的全自动的智能化的汽车,也算得上是一个机器人了呢
回到更现实的世界,提高汽车的“感知能力”和“判断能力”是主动安全技术发展的一个重要方向。比如现在时速36公里/小时的汽车已经可以实现全自动驾驶了,不过现在的一个瓶颈是人工智能技术的限制,离开人脑,汽车没办法独立应付更复杂的局面,但是可以作为人的好帮手来使用。
路面探测技术在实用性上已经没有问题,已经进入“普及”阶段(至少在豪华车上已经开始了)。
家园 【原创】主动安全技术-自适应巡航控制系统(上) 虽然我天天和汽车打交道,但其实我最怕开车,因为开车对我是件挺痛苦的事,开车的时候需要集中注意力,可是我常常会想到其他的事情,注意力会从驾驶上转移开来,这可真是一个要命的缺点,再想想自己看过的那么多事故现场的分析照片,就已经是冷汗直冒了。如果我们的汽车能够自动驾驶,不就能把我这样的人解放出来了吗?考虑到像我这样的懒人的需求,工程师们开发了ACC(Adaptive Cruise Control),中文翻译为“自适应巡航控制系统”。
汽车自适应巡航的基本功能是自动避撞系统,我们可以自己设定自己觉得安全的车间距离,避撞系统通过控制本车的油门和刹车来控制本车的速度和加速度,以保持设定的目标距离。它工作的基本原理为是通过雷达探测到前方没有汽车等其它障碍物时,汽车执行传统巡航控制,按驾驶员设定的速度行驶;当雷达探测到前方有汽车切入或减速行驶时,启动ACC 控制系统,介入发动机和刹车系统,以保持设定的车辆间距。同时,驾驶员也可以设置一个希望的行驶速度,在畅通的道路上,ACC可以使车辆持续以此速度行驶。
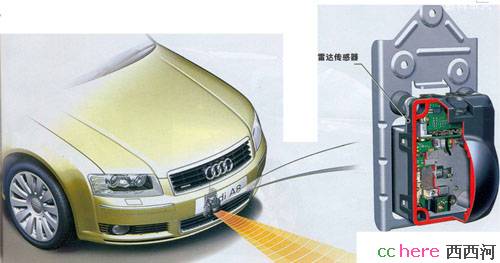
ACC 系统主要由测距系统(雷达和热成像仪)、ECU 和作动器组成。测距系统包括毫米波雷达和热成像仪,用于测量本车与障碍物(车,人,或其他物体)的相对距离、相对速度、相对加速度;中央控制单元ECU 进行控制计算,负责计算设定速度、实现车头净距控制的加速度,并发出控制指令,控制汽车速度和加速度的执行机构;动作器简单来说包括方向盘,油门和刹车。
毫米波雷达的工作原理是基于多普勒效应的,呵呵,先简单解释一下什么是多普勒效应吧。所谓多普勒效应,是指波在波源移向观察者时接收频率变高,而在波源远离观察者时接收频率变低。生活中的例子就是火车的汽笛声,当火车开向我们时,其汽鸣声会比平常更刺耳,而远离我们是,汽鸣声变小。回到我们的毫米波雷达上来,如果物体相对于发射机在移动,接收信号的频率就会因为多卜勒效应而改变。物体接近时,接收信号的频率会升高,物体远离时则降低。频率曲线叠加在一起即可得到一个完整接收信号,它的中频信号包含发射机与目标之间的距离和相对速度等信息。如果车上安装有足够数量的天线,它们还能计算出目标与车辆的纵轴夹角。毫米波雷达的另一个优点是天线很小,使得它们能被隐蔽地安装于车头,车侧和车尾等任意位置。目前大多数的自适应巡航控制系统都采用77 GHz长距离雷达。
呵呵,来个强悍的,在长弓阿帕奇直升机旋翼顶端的那个大球就是一部毫米波雷达。

还是回到我们的汽车用毫米波雷达上来,这个看着就不那么BH了吧:
不过雷达也有缺陷,雷达波打在人体上很少有被反射回去的,对于雷达来说,人和动物就是“隐身”的了
 。这怎么行,俺在打瞌睡的时候,万一高速公路上出来一头斑马,雷达探测不到,汽车就撞上这个傻不楞登家伙,俺。。。
。这怎么行,俺在打瞌睡的时候,万一高速公路上出来一头斑马,雷达探测不到,汽车就撞上这个傻不楞登家伙,俺。。。所以在汽车探测器中,还要使用热成像仪,热成像摄像头直接以探测到的物体和行人的热辐射作为影像数据的来源,而无需车辆提供额外的红外线光源。处理器将这种热量信息转化为目标数据进入ECU。
热成像仪:

热成像仪对夜间行驶的帮助也很大的,可以有效的弥补灯光系统的不足

不过热成像仪也有缺点,即在恶劣气候下(如大雨、下雪、起雾或沙尘暴等),监测距离会大幅缩短。
当然,目前的技术来讲,ACC系统还不能完全取代驾驶员的操作,毕竟人脑还是要比电脑聪明得多,所以现在一般采用的控测策略是,ACC系统给出的信号控制的加速/制动的使用范围在2米/秒左右,一般来说,这足以实现对车速和距离的精确控制。当有突发状况发生,需要更大的加/减速时,会有一个光学和声音信号通知驾驶者及时采取措施。目前在比较高级一些的车上,如奔驰,宝马,沃尔沃的豪华车型上都已经装备了复杂程度不同的ACC系统。
还有哪些技术可以进一步提升ACC系统的性能呢?呵呵,且听下回分解
家园 Nissan FX Inifiniti FX 系列也有 用的是Laser Scanner.设定的是Time Headway就是去前车的距离等于本车车速乘以Time Headway.
主动安全技术进入市场的另外一个障碍就是法律。如果车子take over,将来打起官司来就麻烦了。所以,汽车生产厂家都叫他们driver assist system
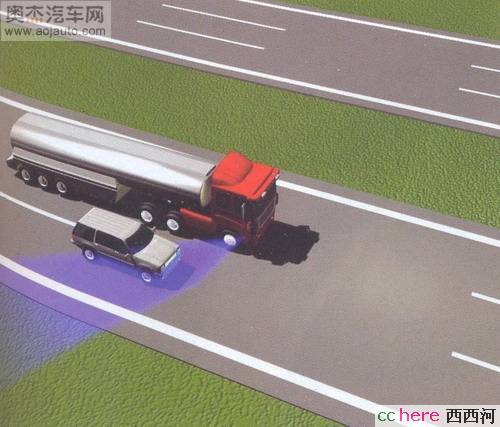
家园 花! 文中一图片是盲点监测的示意,沃尔沃XC70好像已经装了 是在反光镜侧的窗内有一小灯闪示盲点范围呢的车辆, Infiniti是装摄像机,他们新EX系CUV上有三、四个摄像头把车四周围全看清楚。
家园 会不会增加额外风险 对ACC没有概念,不过知道cruise control是有点小风险的,尤其在过弯和地面湿滑的情况下,会造成失控。我个人也曾经有过一次体会。
ACC会不会也有这方面问题?比如前后两辆车,依次进入弯道,前车减速,后车的ACC工作,结果减速的同时入弯,造成风险。
家园 其实现在ACC的概念已经外延了 像ESP,ABS这些系统都要被陆续整合到一起来,整车的自动化程度会越来越高,会有更多的传感器在汽车上使用,比如轮胎压力传感器,车身姿态传感器,路面状况激光探测器等。在整合这些系统之后,ACC的功能会更加完善。我觉得ACC就是未来的自动驾驶仪的基础平台了。
对于你后面介绍的那种情况,在ACC的范畴里,还有一种叫做车道保持系统可以解决这个问题。
我后面的帖子会陆续介绍一些,不过我在主动安全方面知道的也是皮毛,写出帖子来,和大家共同探讨。