主题:漫话眼镜蛇运动一二三 -- 锋芒
家园 所以我就想拉 如果眼镜蛇运动 能够在不带速度的情况下实现,是不是就一定需要矢量喷管呢.
飞机在作这种眼镜蛇机动的时候,实际上已经基本脱离空气动力的领域了吧. 因为已经失速状态了.
这个事情可以拿一个试验.
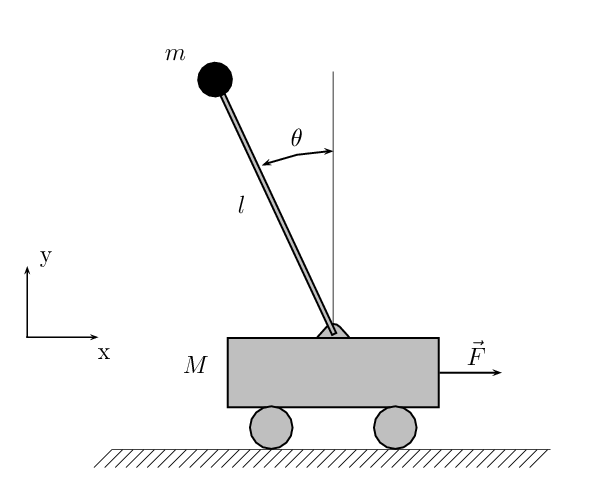
你用手 托着酒瓶子的底 ,然后让他倾斜一点角度,但是同时又向这个角度平移,这样如果你的手平移的速度和酒瓶子倾斜的角度合适的话,那酒瓶子就会维持一个倾斜的稳态.
但是这个稳态理论上来讲,是必须以加速度平移来维持的.但是如果考虑到空气阻力,要实现"手的平移不是以加速度来运行而是以匀速来实现稳态"则需要机体倾斜所带来的水平方向的力,必须跟由于矢量喷管产生的力所导致的水平方向运动所产生空气阻力相等(哎呀妈呀累死我了,幸亏不是面对面跟你们讲话否则费舌头转筋不可).
这种想法有没有道理尼
- 复 所以我就想拉
家园 你是把眼镜蛇动作和倒立摆等同起来了 要是没有前进速度,自然只能用矢量推力维持升力和姿态控制,不过我不知道矢量推力是不是可以做到顶着倒立摆的机动小车那样的响应速度。好像还没有在实际飞行中实现这个动作的,也没有听说有人在做这方面的试验,这个动作的战术和经济意义也看不出来。
 外链图片需谨慎,可能会被源头改
外链图片需谨慎,可能会被源头改这是不是你想表达的意思的简化形式?这是动力学控制的一个经典难题,需要用现代控制理论解决,但是理论问题已经解决了,实验室实现现在也不是问题,有时用作机械系高年级控制专业的大实验
家园 4d4d 我就是这个意思
不过倒立杆 上面有翅膀 就能增加横向的空气阻力啦
有这个阻力面,矢量推力所产生的速度就可以产生足以保持平衡的力. 就一根棍子肯定是不行地
ps:我个人感觉,f22做不出眼镜蛇运动,根本原因是在于老美的矢量喷管技术不过关,做不到老毛子那种地步. 我见过那个裸机演示矢量喷管的过程里面,喷管的灵巧程度那可是相当滴惊人滴.
为啥美帝滴技术还不如老毛子尼,我是这样想滴,老毛子好这个啊,搞了好几十年了,老美搞的晚,虽然大的原理都知道,可一些技术细节没有积累是弄不通滴,老毛子花了好大滴功夫搞通了,肯定不会对外讲滴. 而且有些东西,你看上去是这个样子,拿来解剖可能不是这个样子,而且就算你解剖了尼,也不一定能知道人家怎么作滴.
- 复 4d4d
家园 美国研究矢量推力的历史可不短 美国矢量推力的水平低于俄罗斯,这是从何谈起呢?就因为F119是二维矢量推力而AL31FU是三维?说来有意思,二维矢量推力在技术上比三维更难,美国有和AL31FU相似的三维矢量推力技术,GE曾打算给F110加装,但成本效益上不划算,就搁置了。
家园 个人呢感觉吧 我个人感觉是这样
美帝对矢量喷管不如老毛子热心,自然水平上不去啦 ,这个水平指的是综合水平,也就是出成品的能力. 所以他水平不如老毛子啦.
另外 关于矢量喷管的纬度 我有个疑问
所谓二元矢量喷管 是不是就是说 可以左右 或者上下摆动,但是不能斜方向摆动呢?
而三维矢量喷管是不是指的不光可以上下左右摆动,而且能够收缩和扩张尼?(因为我看到的那个裸机过程就是这个样子滴)
第二个就是 矢量喷管是不是仿生学产物?
家园 期待下文 不过有一些地方值得商榷:
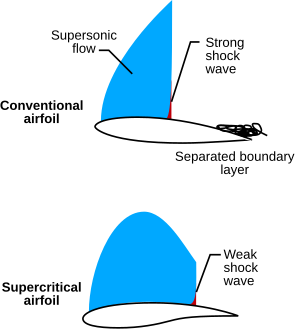
机翼的升力理论有两大路子:贝努力理论和下洗气流理论。还有一个是纯从数学出发的,对于物理机制没有解释。早期以贝努力为主,现在越来越多的机翼无法用贝努力解释,超临界翼就是一个例子。
 外链图片需谨慎,可能会被源头改
外链图片需谨慎,可能会被源头改上为贝努力翼型,下为超临界翼型。超临界的原理我也不大清除,只知道和贝努力不一样
战斗机提高机动性的矢量喷管和垂直起落的矢量喷管不是一回事。垂直起落需要下偏至少90度,提高机动性不需要那么大,极大地降低了技术难度。F119那样的矢量喷管对于直接升力的贡献不大,主要作用在于大迎角低速机动时气动控制面效用严重降低时增加控制力矩以强化机动性。矢量喷管也不是天然必须电传的,“鹞”式上的“飞马”就没有。
 外链图片需谨慎,可能会被源头改
外链图片需谨慎,可能会被源头改F119的上下偏转也就正负30度的样子
飞机侧飞的时候,垂尾只产生少量升力,大部分升力是由机身产生的。侧飞中的机身轴线高于水平线若干度,不是水平的,而是侧身向上拧着脖子飞的。双垂尾也不是用于增加侧飞升力的,尤其是内倾或者外倾的双垂尾。
眼镜蛇动作的关键在于升力中心、重心和惯性之间的协调,不是必须用矢量喷管才能实现的,有了矢量喷管也不是一定就能实现的。F-22就没有公开证明过“眼镜蛇”能力,至少是不必“飘高”高度的眼镜蛇。
现代战斗机机翼越来越靠后是放宽静稳定性的结果,可以减少高速飞行时的配平阻力,并降低过稳定性(也就是增加机动性)。
后掠翼的上扬失控是翼尖失速造成沿机翼方向产生的升力中心前移的结果。翼尖失速是后掠翼上表面气流展向流动的结果,翼刀、翼尖小翼都是用来干这个的。
机翼前缘锯齿的最新例子是F-18E。
 外链图片需谨慎,可能会被源头改
外链图片需谨慎,可能会被源头改锯齿边上的阴影是多孔槽,用上洗气帘起到翼刀的作用
- 复 期待下文
家园 1) 眼镜蛇这类不可控的“摆动”根本不在超机动的研究范围 2) F-22可以在60度迎角围绕速度向量横滚;
3) 我看你不要再写下去了,很不拉风~~

家园 嗯 我的原意是这样的 眼镜蛇运动 究竟是可控还是不可控的呢?
我感觉 现在是不可控的(这个不可控指的是不是绝对的不可控 而是说无法从硬件层来控制,实际上现在的眼镜蛇运动在老练的飞行员手里是部分可控的,而且技术越高吧,起树的时间好像越长)
但是未来的王道是矢量喷管哪,到时候就是可控的了,也就是说,可以通过数字技术,在每一个普通飞行员身上做到.
至于你说那个f22的横滚吧,我感觉那没什么打不了滴,那其实是说明f22推力强劲 气动布局好. 大迎角不失速还要作横滚,这确实也很牛滴,可跟眼镜蛇运动不是一个档次滴事情.
横滚算神魔,我以后写到眼镜蛇三,会让它乱滚滴.哈哈哈哈
家园 如有高见,请出示 至于拉风,这从来不是我的目的,不知道是不是你的?
- 复 期待下文
家园 非常感谢 指教 上文中对白努力原理在机翼的升力产生方面的阐述 并不很精确 只是一种含糊的描述 超临界机翼,嗯
我不懂.呵呵 刚在网上搜了一下,看到一张两种机翼的升力在音速上下的曲线图 稍微有了点概念.
垂直起降的矢量发动机跟矢量喷管确实不是一回事,两者唯一的共同点就是都可以叫做矢量发动机. 这也就是说其实两者只在数学领域有那么一点点交集就是矢量这个概念.
矢量发动机系统对于电传系统确实不是必须的,不光是飞马系列,我印象中似乎看过一段 矢量发动机的裸机控制演示,似乎这种矢量喷管的也可以用机械控制.(但是这个裸机演示是不是通了电并不知道只是猜测)
不过我个人比较倾向电传,是因为电传是数控的基础嘛. 而数控我觉得肯定是王道.
双垂尾的设计 更多的作用是为了机动性吧,我猜测. 另外一个用途是可以拿来切割对方的飞机,嘿嘿
对于眼镜蛇运动跟矢量发动机系统呢,我是这么认为的,有了矢量发动机确实不一定能实现眼镜蛇运动. 不过没有就一定不行.
原因是,咱们讲的眼镜蛇运动应该是那种符合他狭义定义的运动. 而眼镜蛇运动有一个很关键的动作就是垂直并且后仰,然后保持稳定状态,而且还要再返回来,而不是翻过去. 这种动作没有矢量发动机的话,我觉得应该是做不出来的,因为没有矢量喷管喷出的气流给他相应的作用力支持嘛,后仰以后就回不来,而要翻跟头了. 这个话说起来很复杂,也不知道我表述的是否合理 清晰 ,但是要是有模型的话我肯定能讲清楚.
所以我才认为眼镜蛇运动的核心意义就在于证明这个矢量发动机系统的作用.
至于f22,我见过他作类似与眼镜蛇的运动,但是仔细看的话实际上是大迎角爬升运动的一个变行,然后保持住空中悬停,但是无法保持一个可控制的后仰--返回运动.由此我判定,f22的矢量喷管技术要么实际上是不过关的半截子技术,要么是一种简单的矢量喷管技术,所以无法实现眼镜蛇.
不过这个f22的设计理念嘛,本身也不在乎这个.人家的卖点是隐形外加超音速巡航等. 我看他的资料,f22其实有一个很大特点就是死高速,也就是说他巡航速度快,但是开加力后的速度提高其实就很有限. 这种设计本身也许并不是缺陷,用句形象化的表述就是,跟狐蝠比呢,狐蝠是一个冲刺型选手,而f22是一个长跑选手.
还有一个问题,就是机头下垂的问题,有人提了,几头下垂会不会是为了克服上仰力? 我不懂,但是个人感觉,机头下垂主要还是为了增加视野,这一点请不吝赐教.
ps:看到专业滴意见出来了,后面的东西写起来怯怯滴了呵呵
