主题:【原创】化工过程控制的实践 -- 润树
我想我搞清楚你的意思了。
另外,你使用的MPC,是matlab带的toolbox,还是其他的软件包?
我以前做过MPC方面的理论,比如说研究控制时域长度、滚动时域长度、预测时域长度、还有控制惩罚因子等等对于控制品质的影响,还有一些优化、稳定性、模型失配时的鲁棒性之类的东西。但是我不了解MPC的应用。最近有个项目,原来是用LQR加状态观测器实现控制的,我在考虑进一步提高性能,就想是否可以用MPC,或是其他的一些控制策略。
化工上用于控制的动态模型基本上是输入输出类型的,具体来说,就是CARIMAX或者截断的FIR,DMC用截断的FIR,RMPCT用CARIMAX,在一定的精度要求下,两者是可以互换的。
dx/dt=f(x,u)中f(x,u)是线性函数的话,何不直接写成dx/dt=Ax+Bu呢?我说的线性动态家非线性约束,是指:
dx/dt=Ax+Bu (或者其传递函数/差分方程、FIR的等价表达)
f(x,u)<0 其中f是非线性函数
对于这样的问题,没有一般的解析解,只有用约束最优化的数值方法搜索。DMC里f是线性函数,所以用线性规划。
我上面说的实时最优化确实就是递阶控制的意思。
这里同行真多,“当时答辩的主席就是蒋先生”,那我们还沾一点“学亲”呢,我的硕士导师就是蒋先生。
除了能处理状态和输出约束外,MPC就是简化的LQR加状态观测器。能不能把控制问题说具体一点?或许能帮忙出一点主意?
control horizon和prediction horizon就是滚动时域啊!这个译名好,十几年来,我就一直不知道这个东西该怎么翻译。
惊喜:所有在本帖先送花者得【通宝】一枚
恭喜:你意外获得【西西河通宝】一枚
谢谢:作者意外获得【西西河通宝】一枚
鲜花已经成功送出。
此次送花为【有效送花赞扬,涨乐善、声望】
好像你是从控制转管理了吧?要去那里高就呀,现在据说是baby boomer退休的时段,空出好多位置呢。
很多东西很象的。日常用的东西,专业门槛没这么高,多花一些心思,有人带着,很快就能适应。
电厂的控制
我的这个问题是个很复杂的问题,而且涉及到一定的IP问题,没法详细谈。
简单地说,这是一个多输入多输出的非线性控制问题。模型是通过有限元分析得出的,所以状态多达数百个;动力学方程dx/dt=f(x,u)中,f(x,u)是x的有理分式,分子分母各含x的高次项。我们有一套成熟的产品,是通过线性化,LQR加状态观测器,还有积分回路、anti-windup之类很多部分来实现的。现在的控制品质还不错,可以说,每一台PC都有我们的一小部分贡献。问题是,随着硬件设备的更新,我们需要设计新的控制器;同时希望能更进一步提高性能。理论上,曾经有仿真显示了H\infty有很好的性能;我自己做过Q-design的仿真,结果也很好。但是在实际引用中还要考虑其他许多问题,比如鲁棒性,还有是否容易实现等等。所以现在还在综合考虑之中。
几百个状态,不大好弄啊。
目前在化工界获得广泛应用的MPC软件有Aspen DMCPlus, Honeywell Profit Controller(RMPCT),Adersa HIECON/PFC, Invensys Connois, SGS SMOC等。它们的控制原理都是基于本章上一节所阐述的MPC基本方程,但在许多细节的设计上有差别,体现在建模的方法,模型的形式,反馈方式,优化目标函数及其约束,输出轨迹和区间,求解方法等等。尽管这些差别导致了不同软件在应用上的非标准化,但是它们的实施步骤却是大致相同的,归纳于下:
1) 对应用对象进行先期调查,分析该过程的历史数据,找到控制系统可以改进的空间并估计其经济效益,规划MPC控制器的结构,定义控制变量(MV)和被控变量(CV),确定是否需要附加检测信号。然后根据调查结果提出报告,报请主管部门批准。做这样一个项目,如果能在半年至1年内收回投资成本,一般就能获得批准。
2) 一旦项目获批,即可对过程进行测试,也就是对过程的输入加以人为的扰动,以观察和记录过程的输出对这些扰动所产生的响应。现在的测试方法有自动和手动可供选择,扰动信号即可是阶越也可是伪随机二进制的形式;既可在预定时间段里只对单个变量进行扰动,也可对多个变量同时扰动。如何选择,取决于使用的软件,过程的特性,和使用者的偏好。无论采用何种方法,这一环非常重要。如果没有好的数据,下一步的建模就成了垃圾进垃圾出。为了从DCS获取数据,在这一阶段还必须建立MPC服务器与DCS之间的数据传送接口。
3) 用过程辨识的软件对测试的数据进行处理,以建立过程输入和输出之间的动态模型。理论上,对于一个MxN的控制器,用软件在几分钟内就可以把MxN的动态模型矩阵建好。但直接把这样的模型用于控制器,不但不可能获得好的结果反而会造成灾难。有经验的控制工程师必须根据自己对该过程的认识,对每一个模型进行定性分析和定量估计,使其尽量接近实际过程;而后再确定将哪些模型留在矩阵中,哪些去除。需要这样做的原因在于,从2)获得的数据不可能都是在理想测试条件下产生的,往往需要对单个变量在特定时段里进行辨识,才能得到合理的模型。
4) 控制器的组态,也就是设定每一个MV和CV的特性参数,比如它的变化区间,加权因子等等。
5) 对控制器进行仿真,通过改变CV的上下限,观察能否获得设计时所预期的效果,也可为控制器的参数整定提供借鉴。
6) 制定控制器的操作规程,对操作人员进行培训。
7) 将控制器投入实际运行,并对其进行调试。达到预期目标后将控制系统交付过程的操作者。
8) 根据一段时间里的控制结果,对预期的经济效益进行验算并提出总结报告。
从以上步骤,我们可以看到,MPC控制系统的实施,并没有一个科学的定义,在很大程度上是工程师技艺的展现。特别是关键的3)和4)。也就是说,对于同一个过程,每一个工程师做出来的控制系统的结果可能都是不一样的,甚至出现很大的差别。但是,随着MPC软件的不断改进,以及人们对它的认识越来越丰富,其应用已越来越普遍,实施的效率也在不断提高。在通用MPC投入市场的初期,只有少数工程公司的专家才能使用,而且实施的时间常常要好几个月,费用往往在几十万美元之数。而现在工业界的很多用户内部,都有了能够实施MPC的人才,所需时间缩短,费用也随之降低。
下面我们就来看一个用DMCplus来控制某有机盐生产过程的实例。图3.1.1是该过程的流程,它主要由三个塔组成:
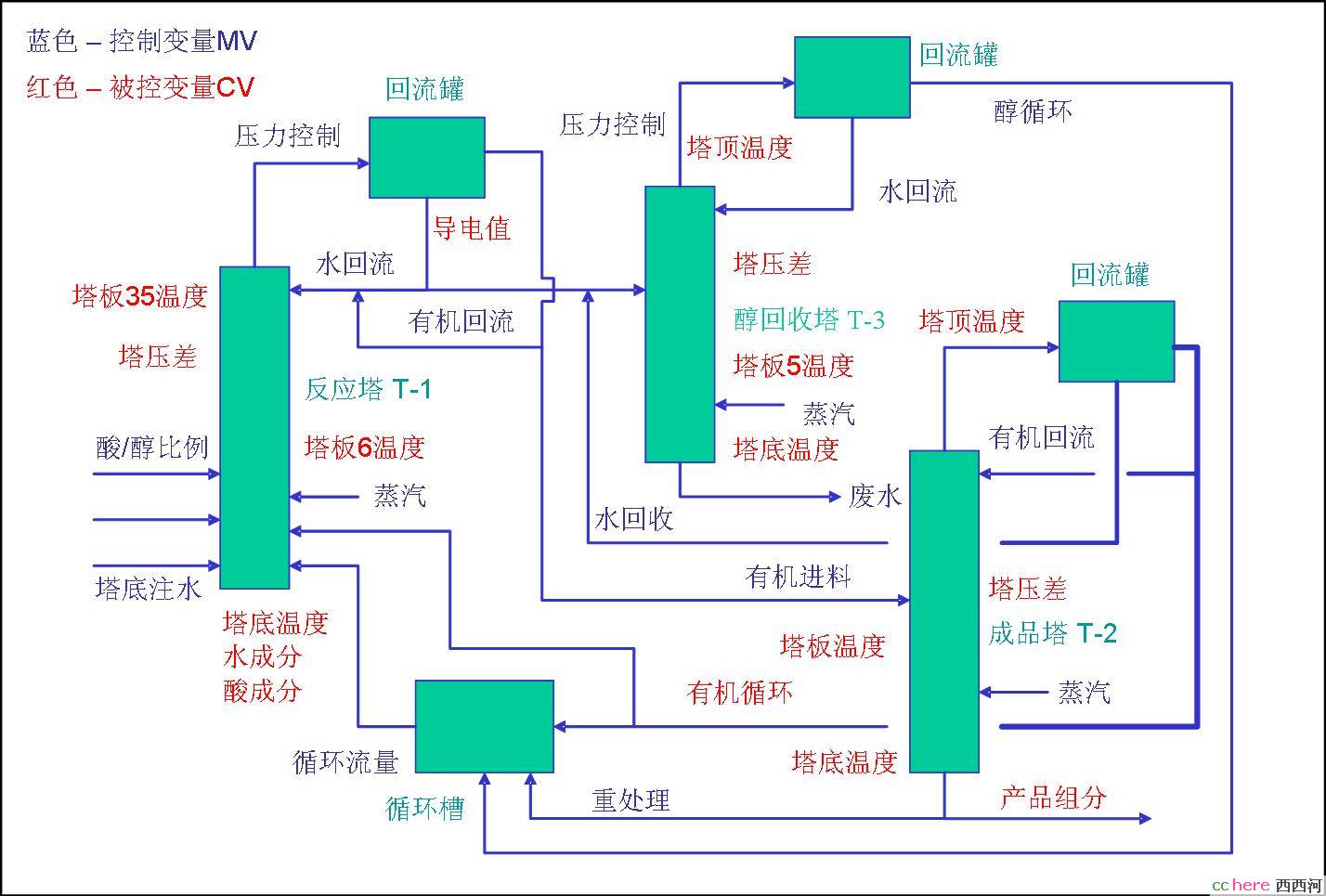
图3.1.1 正丁基酯生产流程
T-1是一个反应器加共沸物蒸馏塔,反应物正丁醇(nBuOH)与乙酸(HAc)在塔釜内进行酯化反应生成正丁基酯(nBuAc)和水(H2O):
nBuOH + HAc = nBuAc + H2O
反应产品酯和水,以及少量的反应物醇被蒸馏到塔顶,在塔底没有物料流出。在塔顶的回流罐里,有机物和水分层,并按操作需要分别回流。控制系统的难点是,要保证反应器内的组分(1)满足物料平衡,(2)有利于正向反应(乙酸成分要高)以及(3)水和酯的共沸(azeotrope)条件,(4)同时要防止乙酸被蒸发到塔顶(与(2)矛盾),造成设备腐蚀和产品超标。由于塔底的进料除了反应物外,还有从中间罐来的循环流,反应器内组分容易受到干扰。而由于催化剂的缘故,塔底组分又难于得到可靠的在线分析。这两个因素加大了控制的难度。
T-2 是产品精馏塔,进料是T-1回流罐里的有机物层,含有酯,醇,和少量水。塔底将得到成品酯,塔顶的有机物和水分层,有机物经中间罐循环回T-1,水则送到T-3。塔底产品有在线成分分析,醇的浓度必须控制在0.4%以下。为了降低单位产量的能耗,提高产品回收率,应将塔底醇的浓度控制在尽量靠近0.4%的数值,同时降低塔顶精馏物中酯的浓度,这就是所谓卡边操作。
T-3是醇回收塔,进料来自T-1和T-2塔顶回流罐的水液层。塔顶回收的醇经中间罐循环回T-1,塔底的水送至废水处理场。这个塔容易控制,但应尽量降低能耗。
为这个过程实施MPC控制系统时,除了需要解决以上的控制难点外,还要求尽可能提高产能。事实上,对于众多的MPC应用项目,通过将装置推向约束极限来提高产能,是控制系统获得经济效益的主要手段。
在工厂测试时,对所有预期的MV的设定值进行了多次不同方向的阶跃改变。分别用有限阶越法(finite step response, FSR)和子空间sub-space)法建模所获得的初始动态矩阵如图3.1.2所示。从图中我们可以看到,用不同的方法获得的模型是有差别的,有时连方向都相反。工程人员不但必须对每一个模型进行仔细分析,决定取舍,有时可能还要对单个模型进行反复计算,以期获得有效模型。
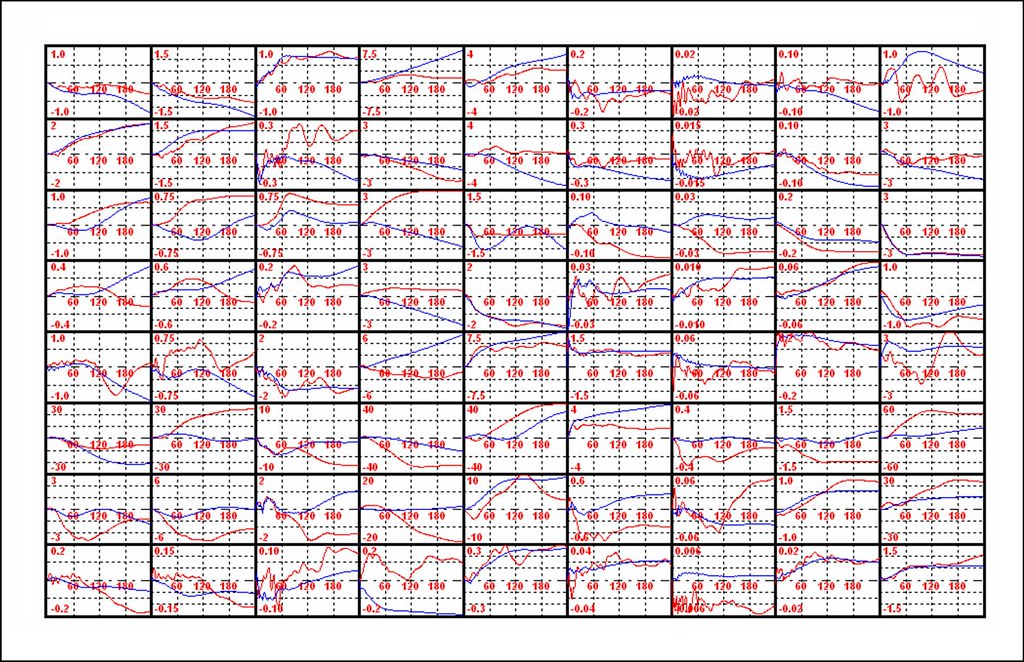
图3.1.2 过程动态矩阵
为了检查某个CV的预估值是否足够准确,可将它与实际值进行比较,如图3.1.3所示。
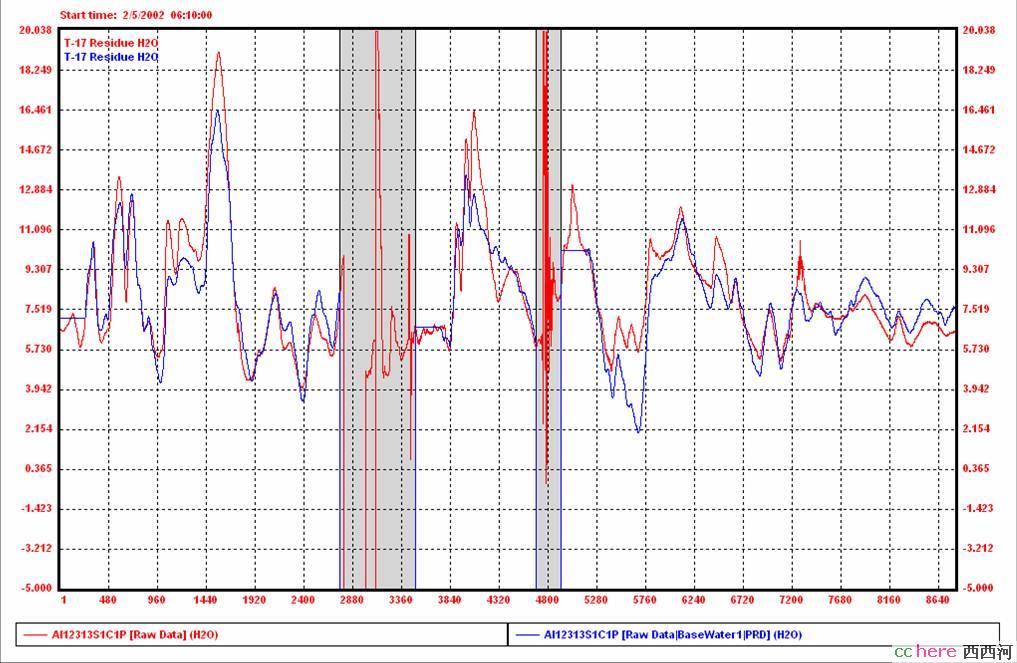
图3.1.3 水组分的预估值与实际值的比较
前面提到,反应器的在线成分分析不可靠,常常会给出不合理的数值,因此必须找到适当的被控变量作为成分变量出现问题时的后备。在建模时发现,塔底温度与反应器的水的成分和第6块塔板的温度与乙酸的成分之间存在较强的相关性,因此这两个温度被包括在控制器里作为CV。在控制器的计算单元,通过逻辑功能来判断在线分析是否正常,以确定是否将组分CV切换到温度CV。
对于这个过程,可以设计一个有三个分控制器的MPC来控制,每个塔由一个分控制器控制,但有些变量可以相互跨越。T-1分控制器是关键。它的MV和CV定义如下:
变量 控制策略
MV1 - 塔底注水 控制反应器内水的成分和再沸器蒸汽阀门的上限
MV2 - 水层回流 控制反应器内水的成分和再沸器蒸汽阀门的上限
MV3 - 有机回流 控制塔回流塔内水层的导电值和第35块塔板的温度
MV4 - 塔底蒸汽 控制T-1和T-2的塔压差上限
MV5 - 酸/醇比例 控制反应器内酸的成分
MV6 - 循环流量 这是一个前馈变量
T-1 CVs
CV1 – 水成分 作为伪积分变量,控制在设定点。
CV2 – 酸成分 作为伪积分变量,控制在设定点。
CV3 – 导电值 反映酸的微量成分,可推向上限。
CV4 – 蒸汽阀 控制在限定范围内。
CV5 – 塔压差 反映产能,推向上限。
CV6 – 塔底温度 反映水的成分,控制在设定范围内
CV7 – 板6 温度 作为伪积分变量,反映酸向塔顶蒸发,控制在设定点。
CV8 – 板35 温度 反映醇向塔顶蒸发的程度,控制在设定范围。
CV9 – T-2压差 反映产能,推向上限。
根据既定的控制器策略,确定了这个分控制器的动态控制矩阵,如图3.1.4所示。
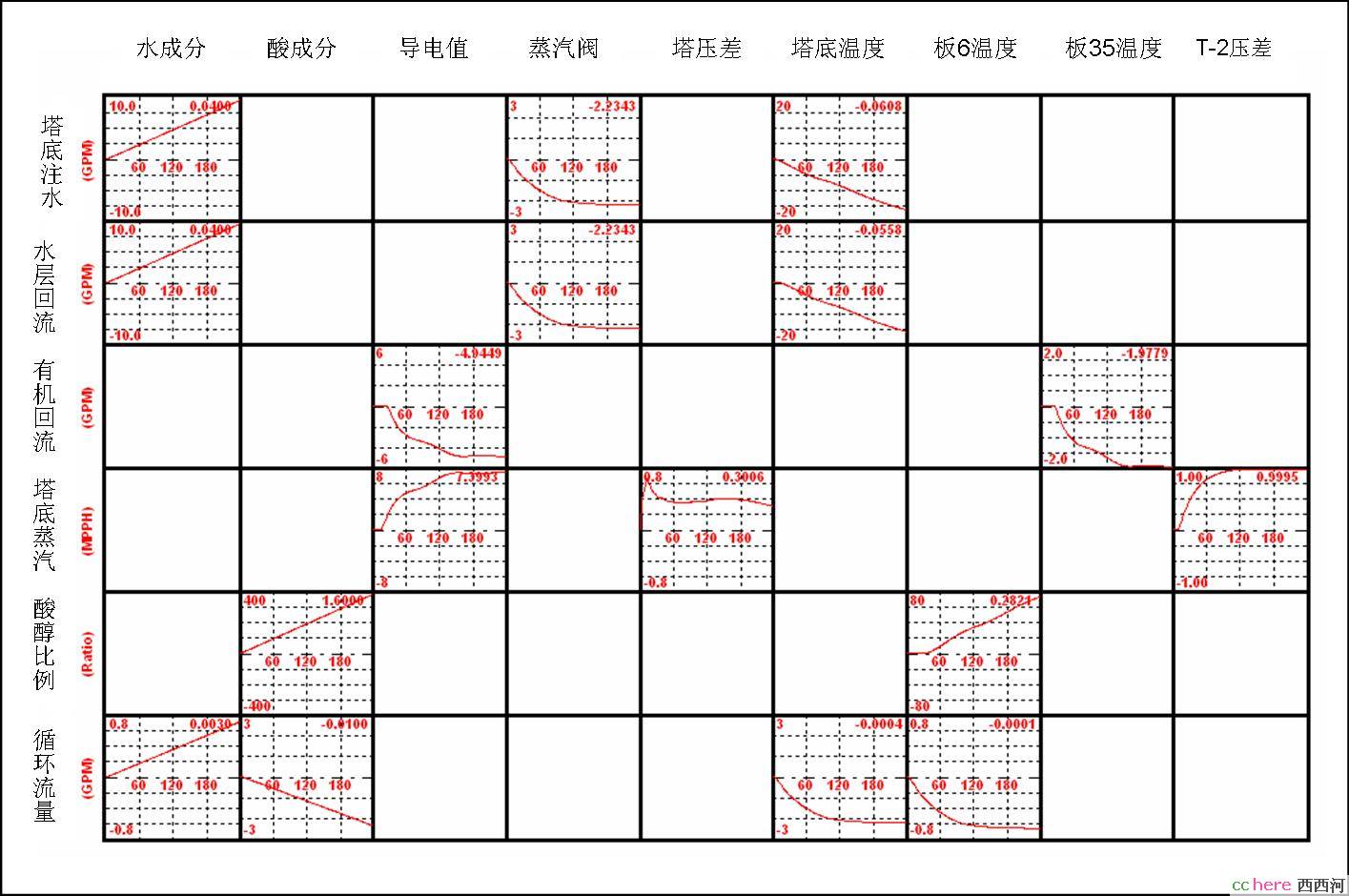
图3.1.4 控制器动态矩阵
我们拿出其中有机回流与导电值这个模型来看一下,如图3.1.5所示。从这个模型我们知道,控制器到达稳态的时间是4个小时。在有机回流1个GPM的阶跃作用下,塔顶回流罐水层的导电值在滞后大约25分钟后开始响应,以貌似多个一阶响应叠加的形式递减,4小时后稳定下来,降低4.96微欧姆。
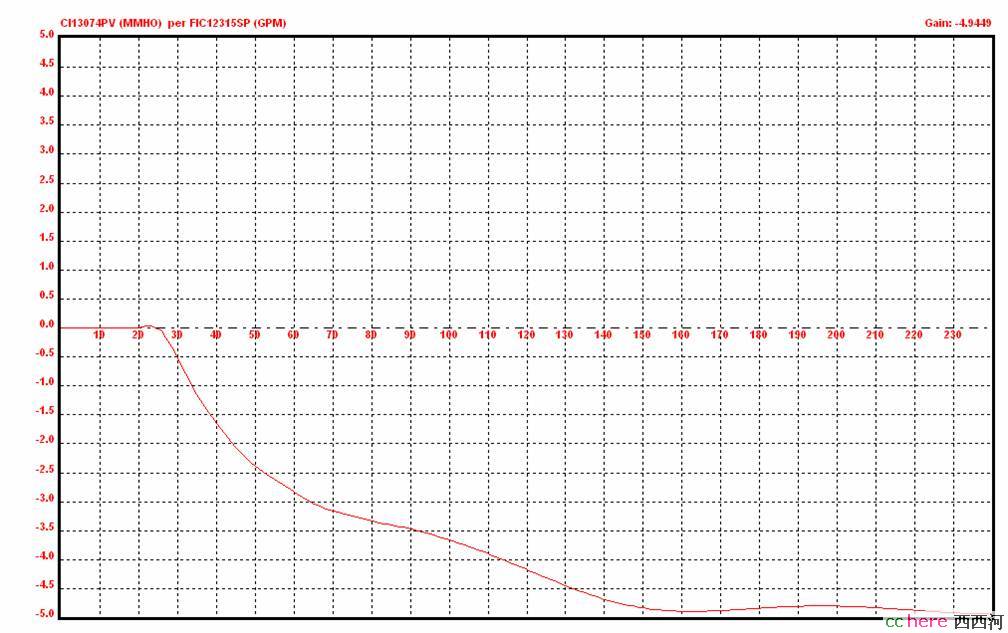
图3.1.5 塔顶水层导电值的动态模型
同时请注意到,模型中有些变量的动态特性是直线的形式。对于这些变量,我们称它们为积分或伪积分变量。比如一个截面不变的开口容器的液位,如果其输入变量(如进口流量)产生一个阶跃变化,而输出变量保持不变,那么液位将随时间线性上升,直到从上端溢出。为了保证安全生产,MPC对这些积分变量是控制在设定值,而不是像一般变量一样任其在上下限之间变动。在一个大的干扰下,如果控制器计算出不能再现定时间里将其控制在设定区间内,它就会将控制器关闭。还有一些变量,像反应器内的反应物成分,如果它的进料流量阶跃增加,而其它反应物流量保持不变,那么它的成分在有限时间里也将线性上升。如果这类变量超出范围并不对安全生产构成威胁,控制器无须关闭,就可以把他们作伪积分变量来处理。在本例中,反应器的水和乙酸成分,以及塔底和塔板6的温度,都是作为伪积分变量来处理的。
控制器的动态模型确定以后,就可以将它输入到控制器组态软件里对控制器与DCS的接口参数,以及MV和CV的性能参数进行设定。如图3.1.6和3.1.7分别是控制器中某MV和CV的部分参数。
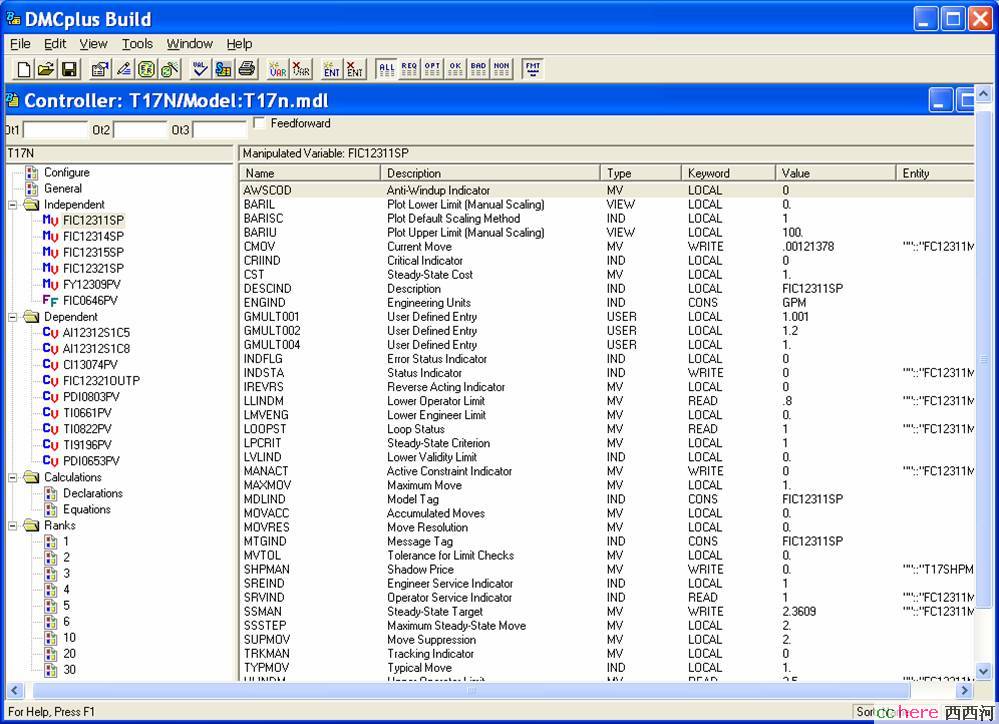
图3.1.6 MV的参数组态表
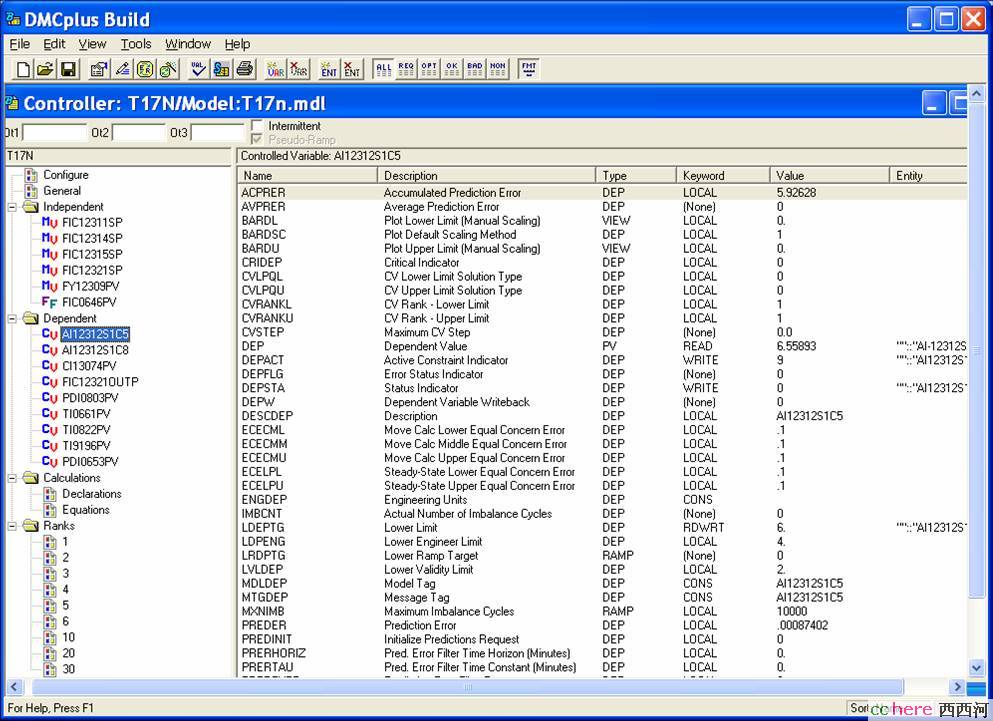
图3.1.7 CV的参数组态表
控制器参数设定好以后,可以对控制器进行动态仿真,看它的控制作用是否符合设计的控制策略。也可输入一个与控制(预估)模型不同的过程模型,来研究控制器对模型失佩(model mismatch)的容忍度。图3.1.8和3.1.9分别是MV和CV的仿真显示,在实际操作时,操作工可改变MV和CV上下限数值。图3.1.10是水的成分控制在其设定值该变后的响应。
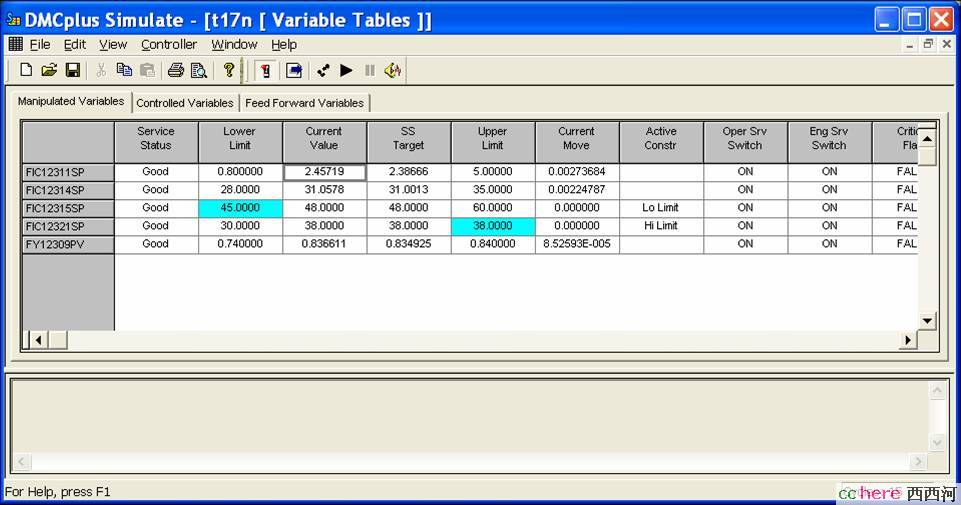
图3.1.8 MV的仿真显示
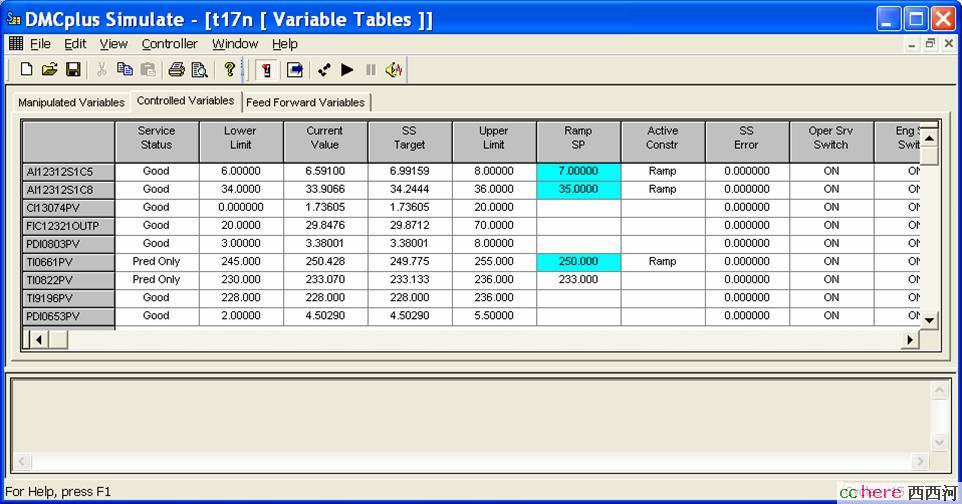
图3.1.9 CV的仿真显示
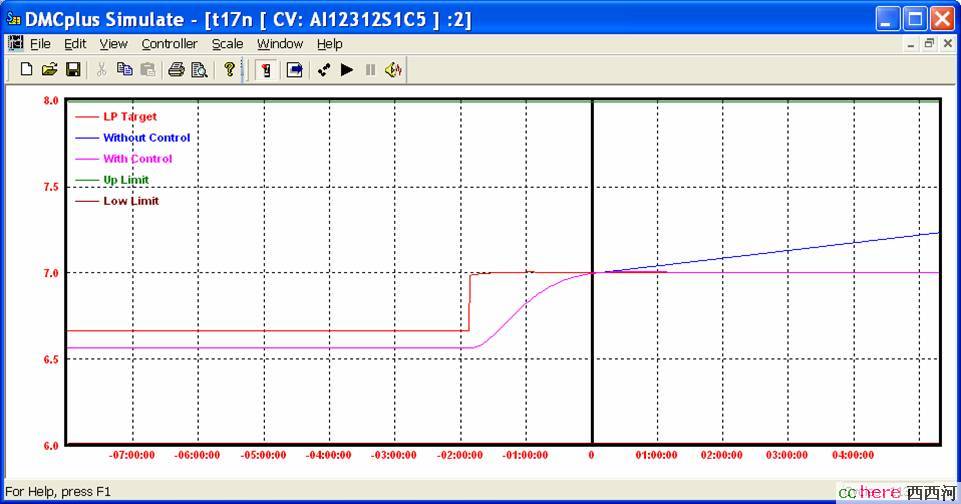
图3.1.10 水组分控制对设定点改变的响应仿真
在以上这些设计工作完成以后,需要用文件记载下来,并且做出一个标准操作手册,供MPC的培训和实际操作之用。
T-2和T-3的设计不做详细说明。下面略述这个过程在MPC控制下的结果。
T-1的控制稳定性有很大改善。MPC实施前,一旦有乙酸被蒸发到塔顶,操作工将手动加大水和有机物的回流,降低酸和醇的控制比例,这样就会严重影响产量,常常要十几个小时才能回到正常操作状态。稳定性提高后,控制器可以安全地增加再沸器蒸汽流量,直到其受到塔压差上限的约束,如此使产能上升,并使单位产品的能耗降低。这个装置可不定期切换用来生产多种醇的酯化物。图3.1.11将MPC应用前几个正丁醇酯的生产周期的产量与MPC实施后一个生产周期的产量进行比较,后者高出前者6.8%,经济效益十分可观。
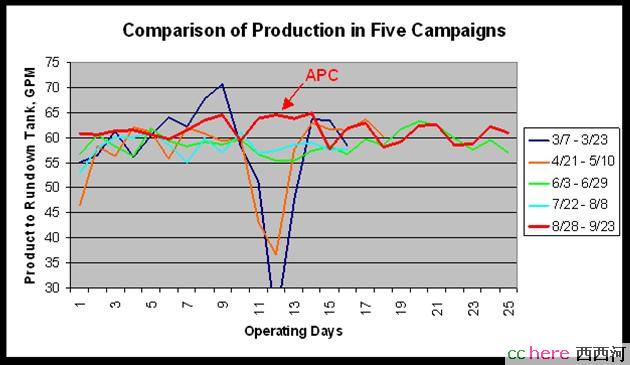
图3.1.11 MPC实施前后的产能比较
T-2的改善主要体现在减少塔顶的重组分(酯)和塔底轻组分(醇)的卡边控制上。这两者都使塔底产品的收率提高,单产能耗降低。图3.1.12是塔底轻组分(醇)的控制结果的比较。
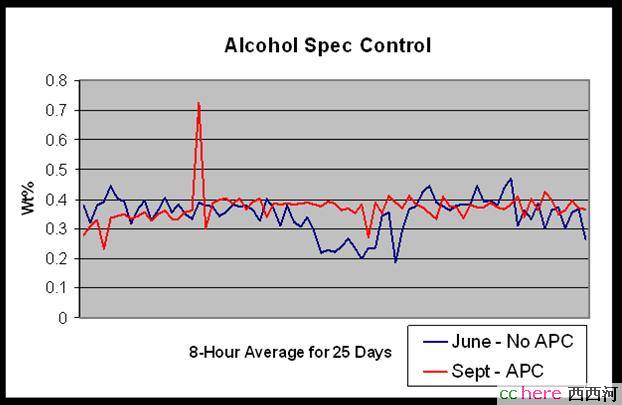
图3.1.12 MPC实施前后产品成分的控制比较
T-3在常规控制下,某塔板的温度与再沸器蒸汽流量构成串级控制。由于该塔板上的组分差不多是100%的水,它的温度控制设定点只要稍高于平衡点,PID控制器的积分作用就会不断增加蒸汽,而实际温度仍不能达到设定点,造成蒸汽的严重浪费。而MPC只要将该温度控制在上下限就行了,优化目标函数总是尽量减少蒸汽流量,结果使该塔能耗降低60%。
整个过程的单产能耗降低了9%。
恭喜发财!
鲜花已经成功送出。
此次送花为【有效送花赞扬,涨乐善、声望】
[返回] [关闭]
图3.1.3 水组分我们也常用:

从本章前面的叙述我们可看到,MPC的实施远非一件易事,除了要求实施者具有全面的过程和MPC知识外,步骤也比较复杂。太极模型预估控制器的面市,就是试图将MPC的实施尽可能的简单化和程序化。
太极控制(Tai-Ji Control)是设在荷兰的一家自动控制系统软件开发公司,由朱豫才博士创立。该公司开发出的太极模型预估控制系统,将(1)过程测试,(2)模型辨识,(3)控制器参数设定,(4)仿真,(5)在线控制这五大功能,全部集成在一个在视窗平台上运行的软件包里,其中(1),(2),(5)可连续自动实现。图3.2.1是该系统的人机界面。与之相比较,目前Aspen 的DMCplus,仍将这些功能分成五个软件包分步骤实施。
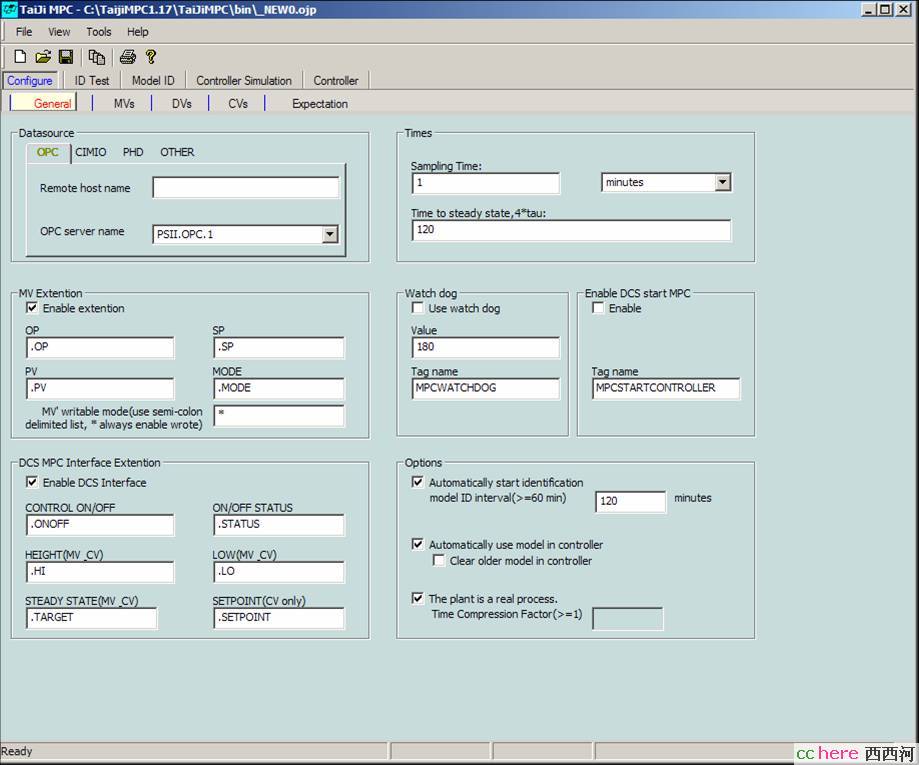
图3.2.1 太极MPC控制系统人机界面
太极控制的过程测试和模型辨识是基于多变量的渐进法,朱豫才博士在此领域有专著论述(《Multivariable System Identification for Process Control》by Yucai Zhu, Elsevier Science Ltd, Oxford, UK, 372 pages, ISBN: 0-08-043985-3,2000)。它的基本方法是,在控制工程师设定好控制器的控制变量(MV)以及它们在测试时的最大变化幅值,干扰变量(DV),和被控变量(CV)以及它们的稳态时间后,系统可在开环或闭环的条件下,以GBN(PRBS)模式输入激励信号对过程进行自动测试,并由获得的测试数据进行模型辨识。识别出来的模型按频率响应法的准则被分别标示出A, B, C, D四个品质等级,便于取舍。过去,做一个MPC项目时大约有30-40%的时间是消耗于这个过程,而且形目的成功与否很大程度上取决于模型的品质,太极控制在这方面的开创性工作和成效,对于今后MPC在各工业界更广泛的应用,是至关重要的。
Tai-Ji MPC的设计思想是,在一个MPC项目实施时,只要工程人员在前期作出该MPC的结构设计和参数设定(design and parameterize,D&P),上述的(1)(2)(5)的所有工作可由该软件系统连续自动完成。这样不但可以将目前一般要二至三个月的项目周期缩短到二至三个星期,而且实施过程接近于标准化,减低了人为因素带来的不确定性。这几项任务在Tai-Ji MPC中的实现分述于下。
结构设计和参数设定
这项任务须由对应用过程和MPC有相当了解的工程人员来完成。图3.2.2是控制器的结构设计表。在这个表里,工程人员必须决定哪些过程变量是MV和DV,哪些是CV,并设定它们的相关参数。
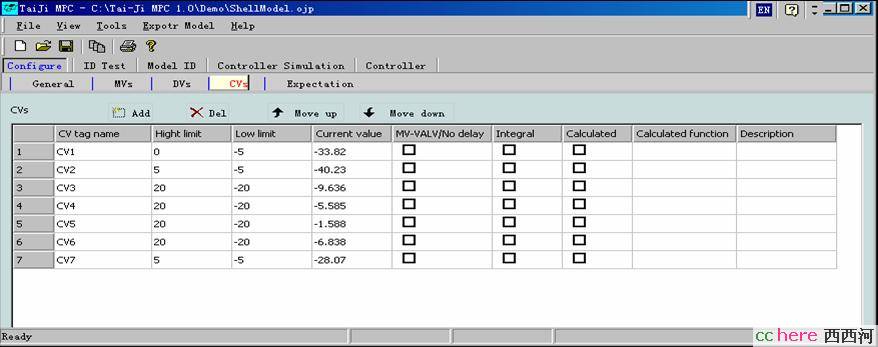
图3.2.2 太极MPC组态表
图3.2.3是控制矩阵的预期表,即工程人员根据自己的过程的认识,预先估计各模型的增益方向,和确定哪些模型是不可能/不需要出现在该矩阵之中。这样做有利于减少建模计算量,提高模型精度。
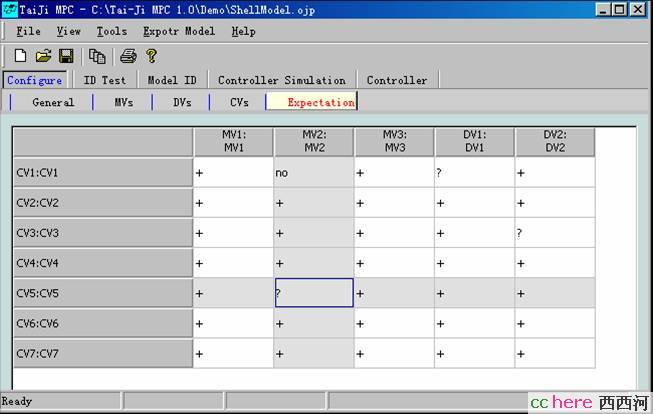
图3.2.3 太极MPC控制矩阵预期表
图3.2.4是系统自动产生的MV激励信号。这些信号是并行的,可连续不间断产生,大大提高了测试效率。
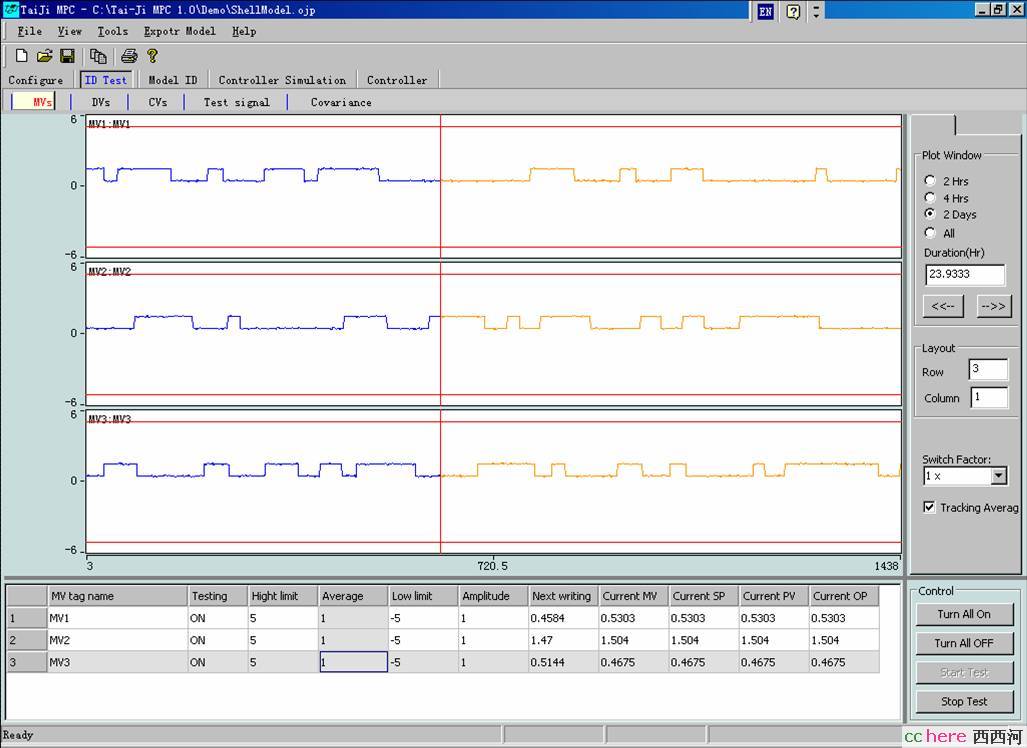
图3.2.4 太极MPC过程测试时的MV激励信号
过程测试和模型辨识
图3.2.5是辨识出来的过程模型。其中标示为A,B级别的,可直接用于控制模型矩阵之中,而C,D级别的要么表明它们不重要,要么还需要修改测试计划,作进一步辨识。同时可以对辨识出来的模型进行仿真,观察模型预估值与实际值的拟合程度,如图3.2.6所示。
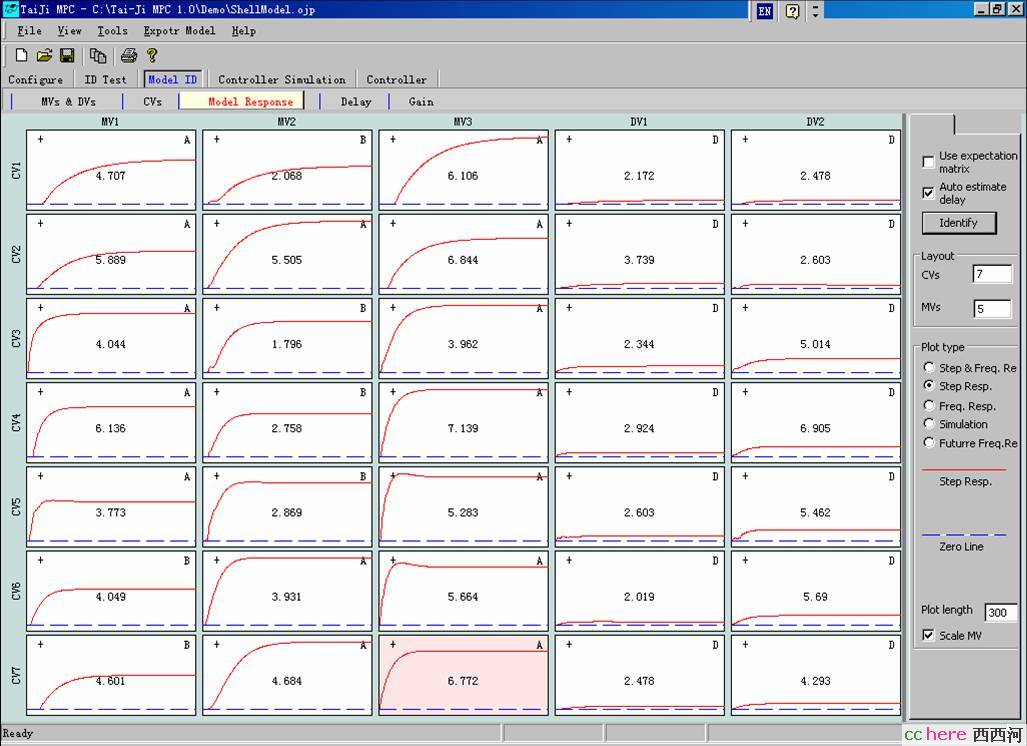
图3.2.5 太极MPC辨识出的过程模型
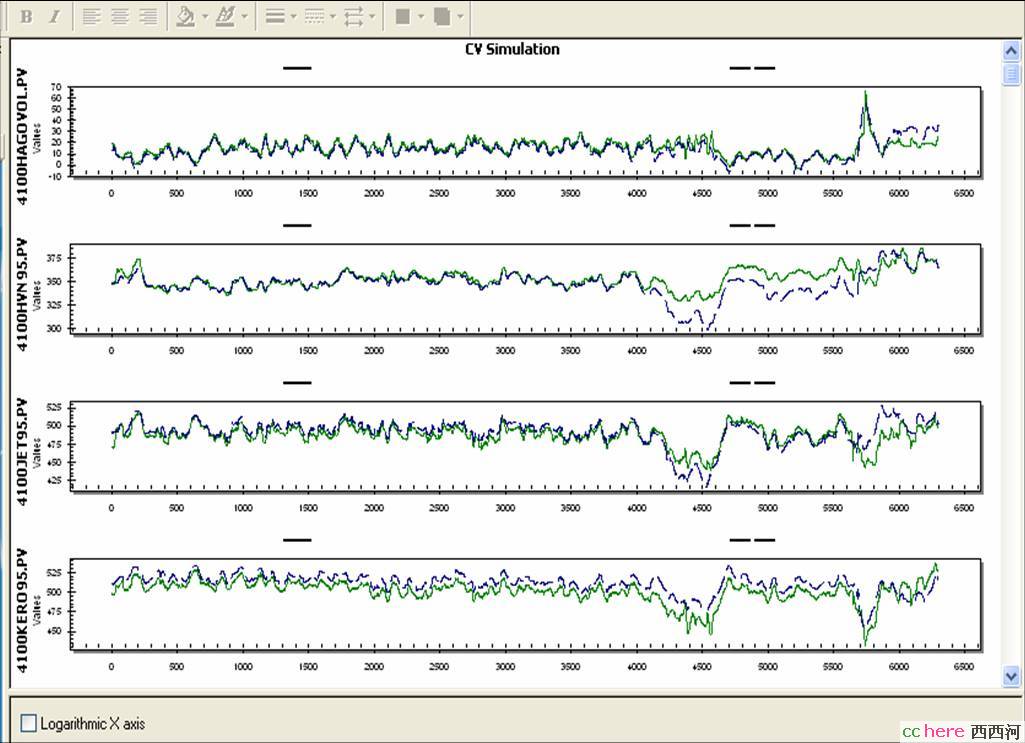
图3.2.6 模型预估值与实际值的拟合程度仿真
如果测试是在闭环的状态下进行,辨识出来的A,B等级的模型可立即投入闭环控制。因此,当所有的模型都达到品质要求时,控制器的在线闭环控制试验也完成了。
太极控制目前还在开发自适应的功能,组成一个“控制 -- 监测 -- 辨识”的闭环系统。它的目标是,用一个在线监测的模快来评价MPC的闭环控制品质,当该品质降低到预定指标时,系统将启动辨识模块,对过程重新进行辨识,使控制器自动适应过程的特性变化。
有关太极控制的详细资讯,可参见以下链接:
*获朱豫才博士同意,本篇材料均取自他和太极控制发表的相关文章,特别致谢。